

キャリアダンプの傾斜角によるスピード抑制コントロールの事例(DC24Vタイプ)
使用例
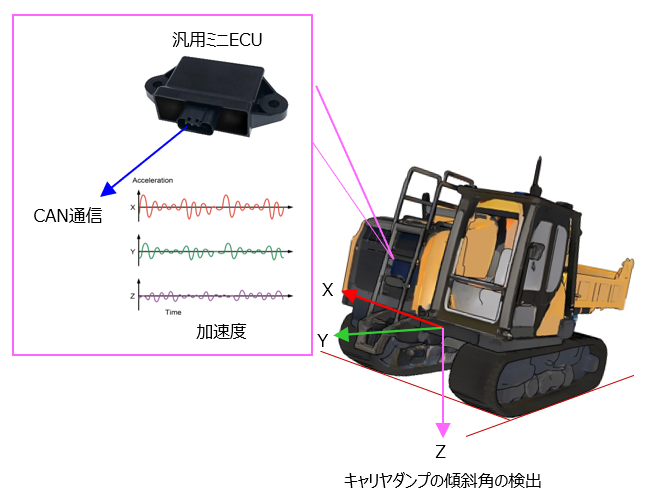
キャリアダンプは、傾斜地での走行が多く、傾斜角がきつい場合や走行スピードが早い場合には、転倒する危険を伴います。
汎用ミニECUから傾斜角の情報をCAN通信でエンジンコントロールECUに送り、傾斜角により、スピードの抑制コントロールを行う使用例です。

背景
転倒防止のため、傾斜角約20度以上の傾斜地では走行しないように言われています。
また、傾斜地では、低速ギヤでかつハーフスロットル以下のエンジン回転で真っすぐに走行し、横走行や斜め走行はしないことなどに、注意しなければなりません。
制御内容
マシンの傾斜角により、スピードの抑制コントロールを行うことでした。
汎用ミニECUの役割
CAN通信※1により傾斜角度データ※2をメイン基板に送信しています。
※1.CAN通信は、ノイズに強く、ノードの多重接続ができ、優先順位の高いものを識別し処理できることから、自動車だけではなく、ソレノイド/バルブ駆動を頻繁に行うプロセス:プラント系、ガス/半導体業界や、リアルタイム性が求められる工作機械・ロボット制御装置や医療機器などに使われています。
ご参考
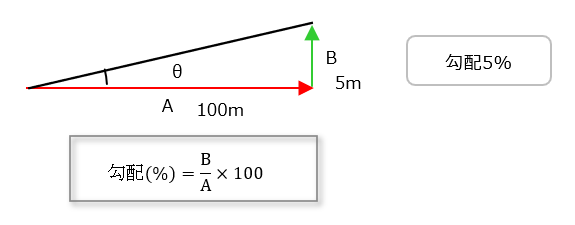
■勾配の定義
勾配は、水平方向に進んだ距離とその時垂直方向に上昇した高さの比率で定義し、以下の通りとなります。
例えば、100m進んで5m垂直方向に上がる場合、勾配は5%となります。
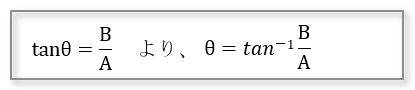
例えば、勾配が5%の時の角度θを求める場合
度数とラジアンの変換方法は、以下になります。
![θ=tan^-1 B/A=tan^-1 5/100=0.04996[rad]=0.04996×180/π=2.86[deg]](/jp/uploads/effc9949d2943c56a2ef05c9e1dbe5e2.png)
■勾配の加速度から勾配角度の算出
以下の様にセンサを置いた時にセンサに加わる加速度(力)から勾配を求めます。
ここでセンサが検出するのは下記”A”の成分となります。
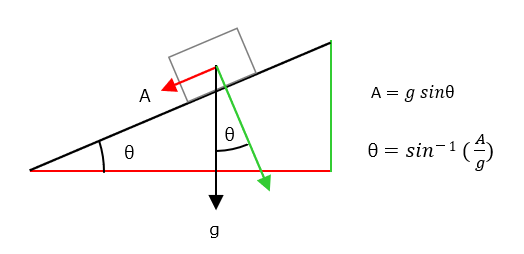
例えば、加速度センサが3.0[m/s2]を出力した場合、勾配角を求めると以下のとおりになります。
![θ=sin^-1 (3/9.8)=0.31[rad]=0.31×180/π=17.8[deg]](/jp/uploads/66d54a1960d230a6a33c8b7f30b1aa33.png)
ここでは、物体が静止している場合について求めましたが、物体が移動している場合には、勾配に対して物体の動いている方向、登っている加速度、または下っている加速度を考慮する必要があります。
使用製品

この製品についてのお問い合わせ
フォームが表示されるまでしばらくお待ち下さい。
恐れ入りますが、しばらくお待ちいただいてもフォームが表示されない場合は、こちらまでお問い合わせください。