

耐環境コントローラ:汎用ミニECU
使用例
- 既存のECUを「汎用ミニECU」に置き換える。
- マスタECUからリモートI/Oとして、汎用ミニECUをコントロールする。
- リニューアルなどで入出力点数が不足する場合のECUを追加する手段として。
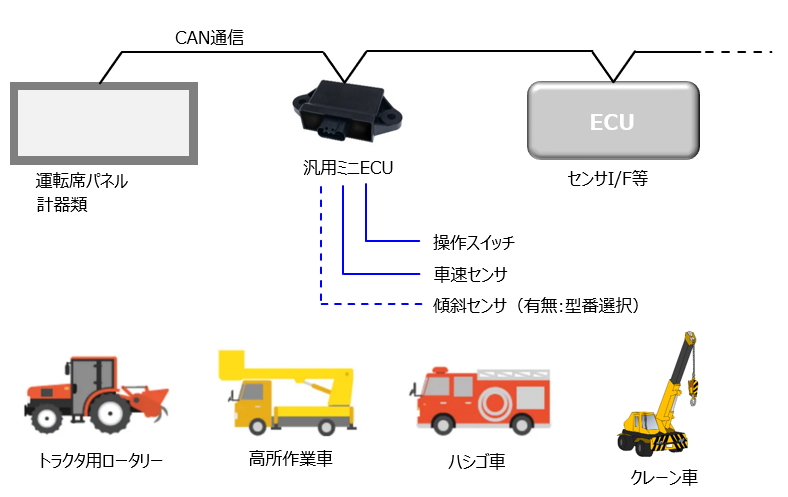
1)CAN通信
CAN通信は、ノイズに強く、ノードの多重接続ができ、優先順位の高いものを識別し処理できることから、自動車だけではなく、ソレノイド/バルブ駆動を頻繁に行うプロセス:プラント系、ガス/半導体業界や、リアルタイム性が求められる、工作機械・ロボット制御装置や医療機器などに使われています。
2)アプリケーション
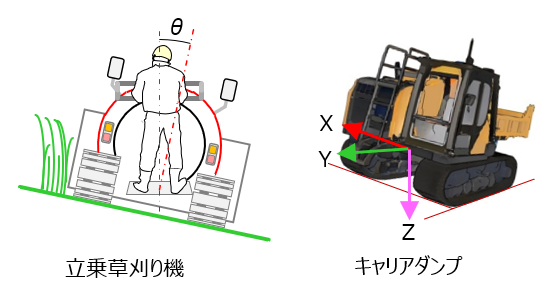
- ECU本体に搭載された傾斜センサを使用した車体や、作業機などの水平制御。
- 操作パネルからの入力や、加速度センサからの情報をCPUにて処理することで車体の状況に合わせた制御を行います。
- 汎用ミニECUはPWM出力を搭載しています。
直接ソレノイドを制御し、車体やロータリの水平制御が可能です。 - 汎用ミニECUと上位ECUをCAN通信で、むすぶことで上位ECUの入出力点数を削減できる他、両者で連携した制御が可能です。
アプリケーション事例
特長
- DC12V車両用、DC24V車両用の2タイプをご用意
- 型番で傾斜センサありを選択すれば、ECUの傾きが検知できます。(水平制御)
- 組み込みソフトウェア開発のご経験をお持ちであれば、無理なく理解できる シンプルなハードウェア構成
- CAN通信による、CANリプロ(市販ソフトウェア)に対応可能
- ソフトウェアについては、お客様独自のソフトウェア開発が可能
仕様
| 電源入力 | DC12Vタイプ | DC24Vタイプ | |
|---|---|---|---|
| 入力電圧 | DC10~16V | DC20~32V | |
| アナログ入力 | 点数 | 2 | 4 |
| 定格 | 0~5V | ||
| 入力抵抗 | 200kΩ±0.5% | 200kΩ±0.5% | |
| デジタル入力 | 点数 | 4 | 4 |
| 入力 | オープンコレクタ | オープンコレクタ | |
| 出力 | PWM出力 | 2 | 2 |
| ローサイドドライブ | ハイサイドドライブ | ||
| Max 2.1A | Max 2.1A | ||
| デジタル出力 | 2 | ー | |
| ローサイドドライブ | ー | ||
| Max 2.0A | ー | ||
| センサ電源用 | 1点 | 1点 | |
| 4.75~5.25V出力 | 5V出力 | ||
| DC5V Max50mA | DC5V Max150mA | ||
| CAN通信 | I/O点数 | 1ch | |
| 速度 | ISO11898-1準拠、~1M bps | ||
| 傾斜センサ | 有無は型番選択 | ||
| 動作温度範囲 | -15℃~+70℃ | -30℃~+80℃ | |
| 保存温度範囲 | -40℃~+85℃ | -40℃~+85℃ | |
| 耐振性 | 振動10~18.65Hz/振幅10mm p-p 18.65~55Hz/定加速度68.6m/s2 衝撃 200m/s2、11ms |
||
| 防水性 | JIS D0203 S2相当 | ||
※1. ハイサイドドライブ/ローサイドドライブのスイッチの説明は、コチラ
ソフトフェアについて
ソフトフェアにつきましては、お客様にて設計の上、弊社へ支給をお願いします。
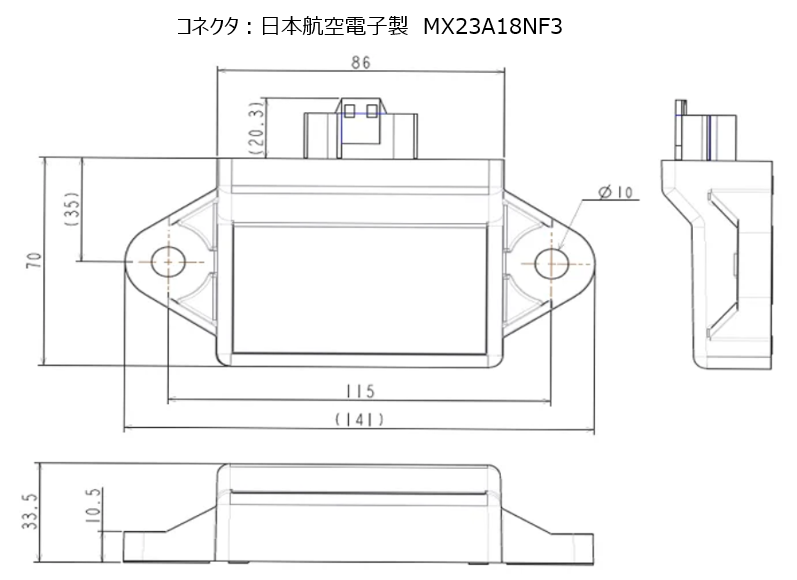
外形図
カタログ
この製品についてのお問い合わせ
フォームが表示されるまでしばらくお待ち下さい。
恐れ入りますが、しばらくお待ちいただいてもフォームが表示されない場合は、こちらまでお問い合わせください。