

製品に関するよくあるご質問
圧入動作をさせたい

質問
ジェイテクトエレクトロニクス(旧:光洋電子工業)製のサーボシステムを使って、圧入動作をさせたいです。
どうすればよいですか?

回答
所定位置までの移動と、原点位置までの戻り動作を PR モードで動かし、圧入は「トルク制御モード」に切り替えると簡単にできます。
設定手順は下記を参照してください。
設定手順
パソコンと AC サーボシステムを専用の USB ケーブルで接続します。
設定ソフト:KSD-Softを起動し、USB 経由で AC サーボドライバを接続します。
1.パラメータの読み出し
パラメータエディタを起動し、アイコンから「パラメータ読取り」をクリックし、サーボドライバのパラメータを読み出します。
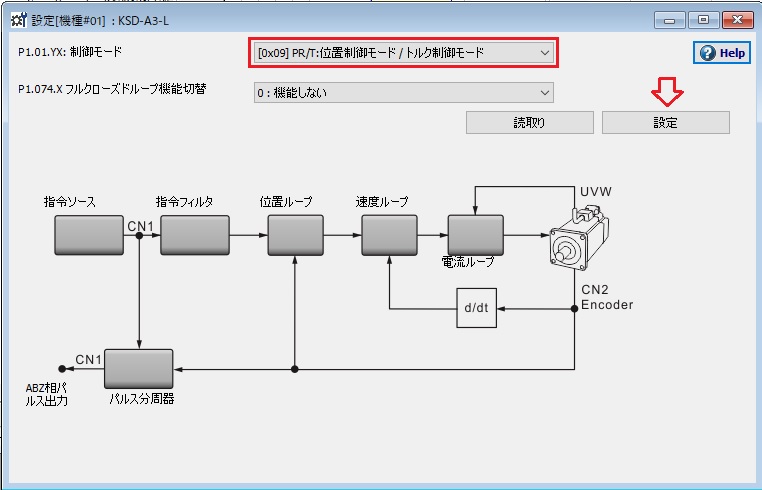
2.制御モードを「トルク/位置混合モード」にする
モード設定を起動し、制御モードを「[0x09]PR/T:位置制御モード/トルク制御モード」に設定します。
設定を変更した場合は設定有効にするため、サーボシステムの電源を Off → On してください。
※サーボシステムの電源を Off → On すると、KSD-Soft は一度オフラインになるので、再接続してください。
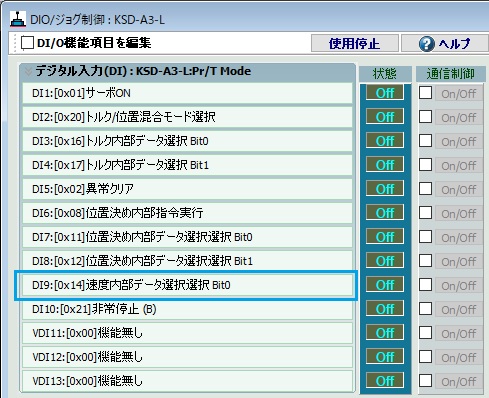
3.DIO の設定
デジタル入出力/ジョグ制御の画面を起動し、デジタル入力の設定をします。
今回は、外部コントローラから
・位置制御 (PR) モード/トルク制御モードの切り替え(下図:赤色枠)
・PR モードでの所定位置までの移動と、原点位置までの戻り動作(下図:橙色枠)
・トルク値の切り替え(下図:紫色枠)
が、できるように設定します。

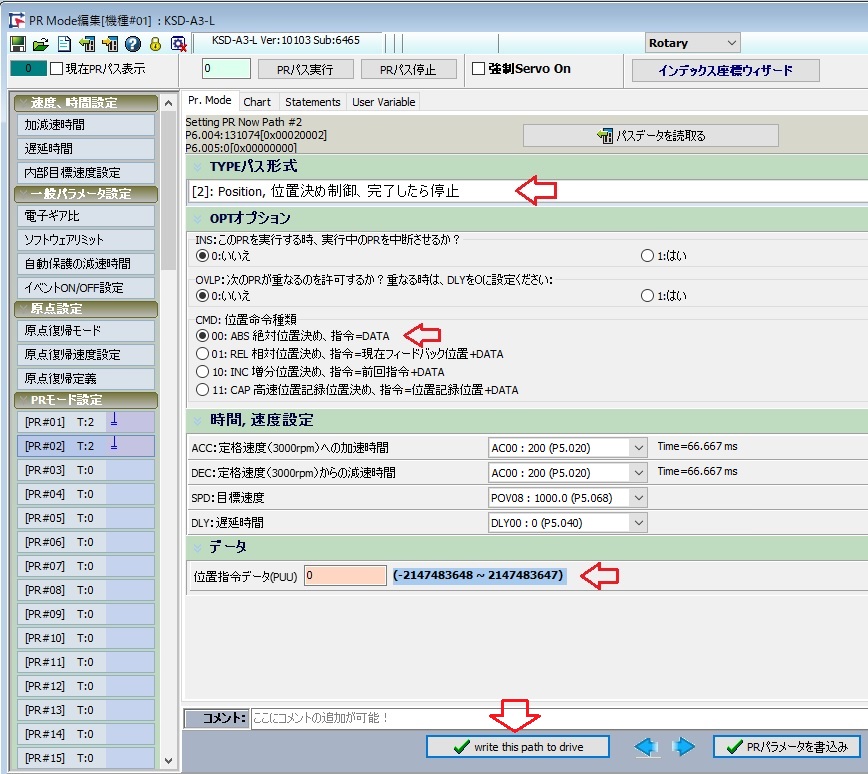
4.PR モードの設定
PR モード設定画面を起動します。
・原点復帰モードを設定します。
・PR #1 に「所定位置までの移動」を設定します。
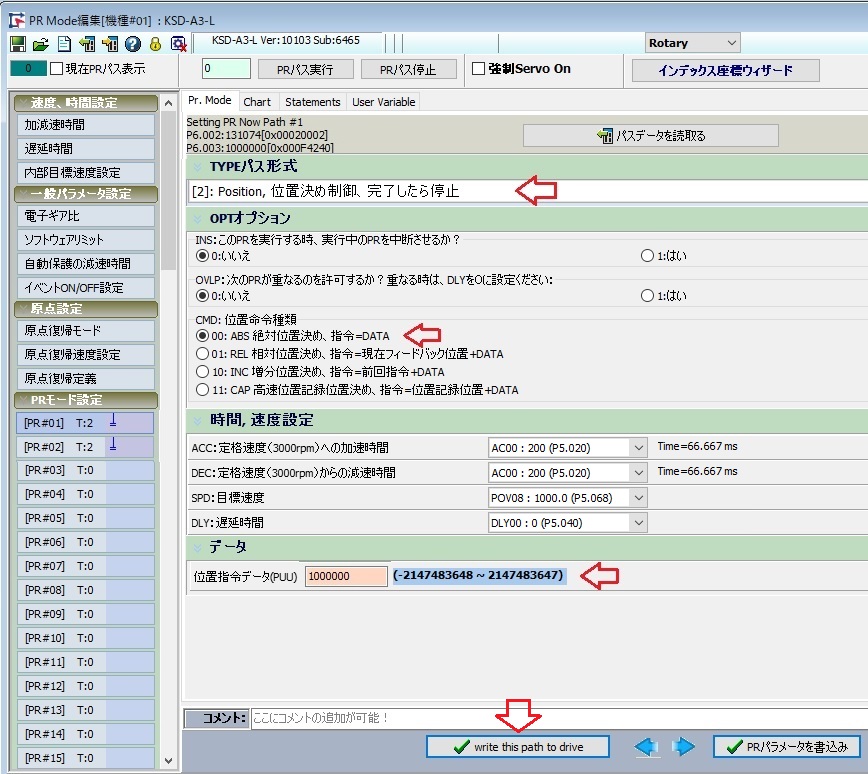
・PR #2 に「原点位置までの戻り動作」を設定します。
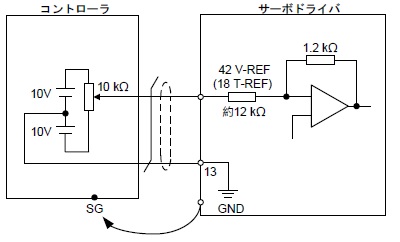
5.トルク制御値の設定
・設定値を3つ設定し、切り替えて使用する場合は P1.012~P1.014に設定します。
(トルク値が固定の場合は、P1.012 に設定して下さい)
・外部アナログ信号で制御する場合は、以下のように配線します。
6.運転
トルク制御は P1.012 で行う場合を例に説明します。
(事前に原点位置を決めて下さい)
| ステップ | 状態 | 入力状態 | ||||||
| DI1 | DI2 | DI3 | DI4 | DI6 | DI7 | DI8 | ||
| 1 | PR モード指定 | OFF | ON | OFF | OFF | OFF | OFF | OFF |
| 2 | サーボ ON | ON | ON | OFF | OFF | OFF | OFF | OFF |
| 3 | PR #1 を選択 | ON | ON | OFF | OFF | OFF | ON | OFF |
| 4 | 所定位置に移動 | ON | ON | OFF | OFF | ON | ON | OFF |
| 5 | 所定位置移動完了 | ON | ON | OFF | OFF | OFF | OFF | OFF |
| 6 | トルク制御に切替 圧入動作 |
ON | OFF | ON | OFF | OFF | OFF | OFF |
| 7 | 圧入完了→ PR モード #2 指定 |
ON | ON | OFF | OFF | OFF | OFF | ON |
| 8 | 原点位置戻り動作 | ON | ON | OFF | OFF | ON | OFF | ON |
| 9 | 原点位置戻り完了 | ON | ON | OFF | OFF | OFF | OFF | OFF |
※2サイクル目はステップ 3 へ
7.トルク制御時に、速度制限したい
詳細はコチラをご覧ください
・速度制限の切り替えを設定します(下図:青色枠)
| ステップ | 状態 | 入力状態 | |||||||
| DI1 | DI2 | DI3 | DI4 | DI6 | DI7 | DI8 | DI9 | ||
| 1 | PR モード指定 | OFF | ON | OFF | OFF | OFF | OFF | OFF | OFF |
| 2 | サーボ ON | ON | ON | OFF | OFF | OFF | OFF | OFF | OFF |
| 4 | PR #1 選択 | ON | ON | OFF | OFF | OFF | ON | OFF | OFF |
| 4 | 所定位置に移動 | ON | ON | OFF | OFF | ON | ON | OFF | OFF |
| 5 | 所定位置移動完了 | ON | ON | OFF | OFF | OFF | OFF | OFF | OFF |
| 6 | トルク制御に切替 速度制限し圧入 |
ON | OFF | ON | OFF | OFF | OFF | OFF | ON |
| 7 | 圧入完了→ PR モード #2 指定 |
ON | ON | OFF | OFF | OFF | OFF | ON | OFF |
| 8 | 原点位置戻り動作 | ON | ON | OFF | OFF | ON | OFF | ON | OFF |
| 9 | 原点位置戻り完了 | ON | ON | OFF | OFF | OFF | OFF | OFF | OFF |
紹介動画