

製品に関するよくあるご質問
シリンダーを往復させたい(モーションコントローラ無し)

質問
ジェイテクトエレクトロニクス(旧:光洋電子工業)製のサーボシステムは PLC のモーションコントローラがなくても、PRモードを使用すればモータを動かせると聞きました。
実際にシリンダーを往復運動させたいです。
どうすればよいですか?

回答
ACサーボシステムの設定ソフト:KSD-Softでサーボシステムを「PRモード」に設定します。
正転方向移動設定/逆転方向の移動設定をプログラム登録して、PLC から DO 出力することにより、正転/逆転の動作が出来るようになります。
設定手順は下記を参照してください。
設定手順
パソコンとACサーボシステムを専用の USB ケーブルで接続します。
設定ソフト:KSD-Softを起動し、USB 経由で AC サーボドライバを接続します。
1.パラメータの読み出し
パラメータエディタを起動し、アイコンから「パラメータ読取り」をクリックし、サーボドライバのパラメータを読み出します。
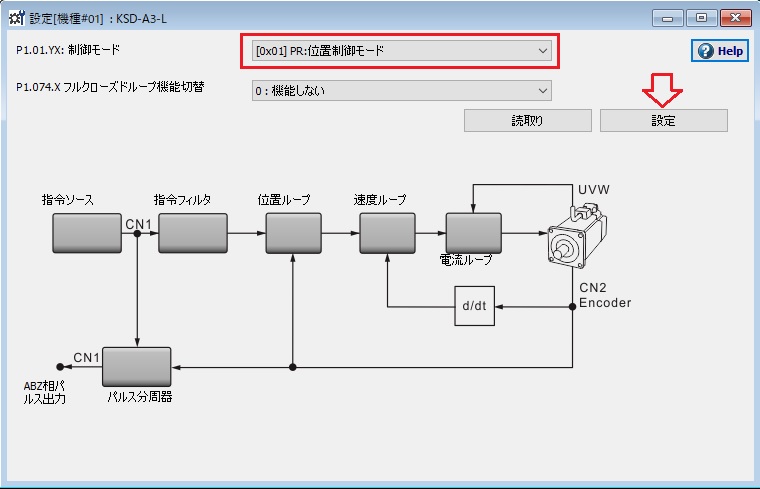
2.制御モードを「PRモード」にする
モード設定を起動し、制御モードを「[0x01]PR:位置制御モード」に設定します。
設定を有効にするため、サーボシステムの電源を Off → On してください。
※サーボシステムの電源を Off → On すると、KSD-Soft は一度オフラインになるので、再接続してください。
3.サーボドライバにプログラムを登録
サーボドライバには 99 通りのプログラムが指定でき、DI に割り当てた「位置決めデータ内部データ選択Bit x」をOn/OffすることによりPLCから実行するプログラムが指定できます。
今回の事例では、プログラム#1(PR #1)に正転動作を、プログラム#2(PR #2)に逆転動作を登録します。
4.正転動作設定
PRモード設定を起動し、PR #1を選択します。
目標速度や移動距離を設定し、サーボドライバに書き込みます。
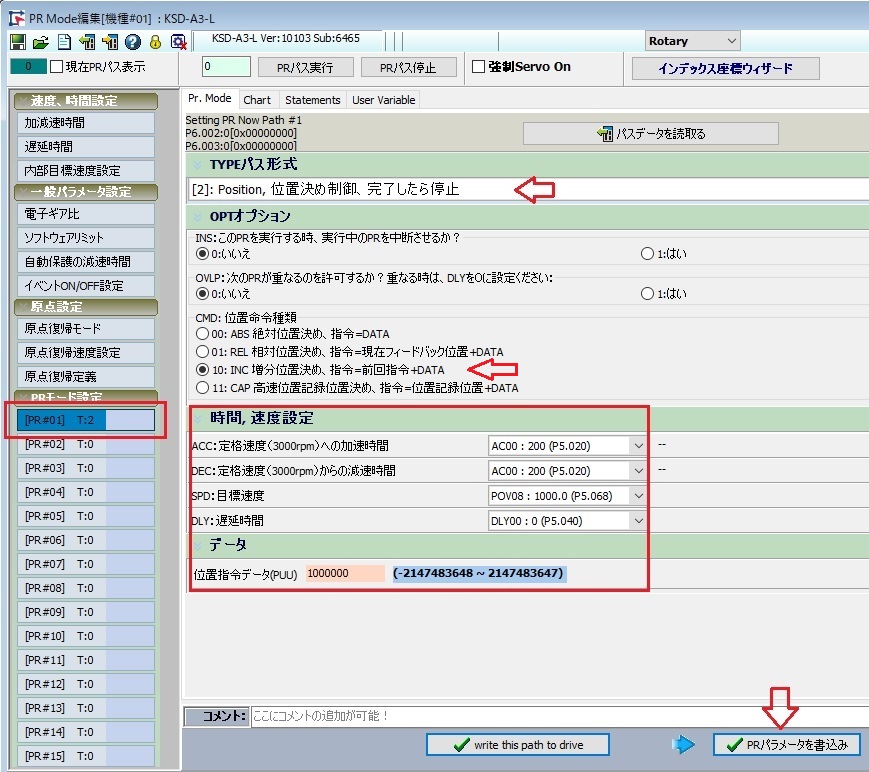
※今回の事例では目標速度 1,000rpm、移動距離は 10 回転としました。
(電子ギヤの分母が100,000なので移動指令を1,000,000PUUとするとモータは10回転します)
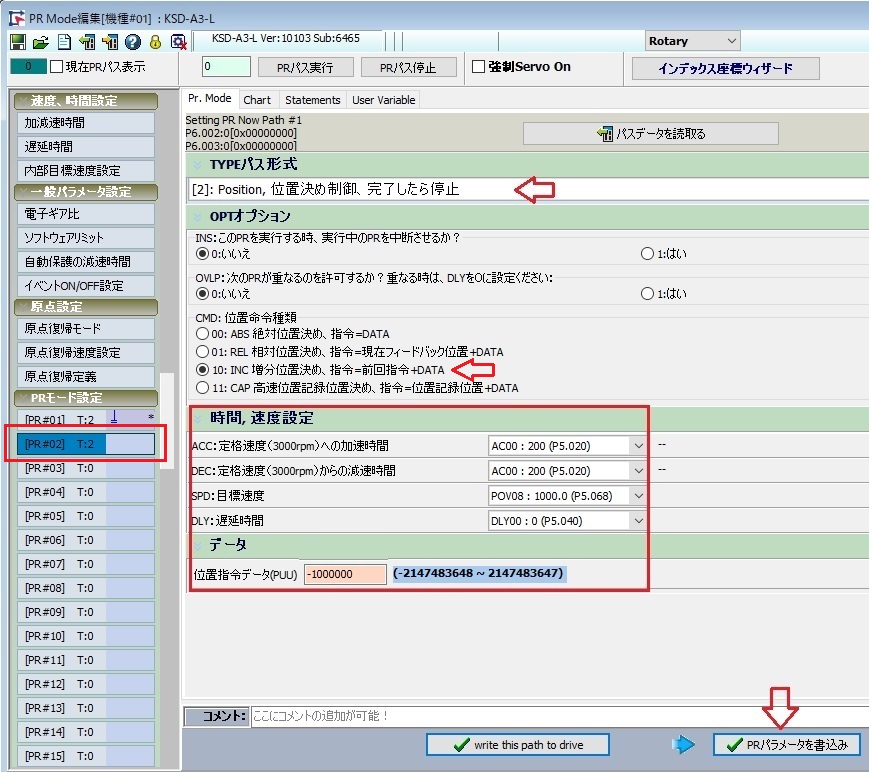
5.逆転動作設定
PRモード設定で、PR #2を選択します。
逆方向に同距離移動させたいので、移動指令は-1,000,000PUUとします。
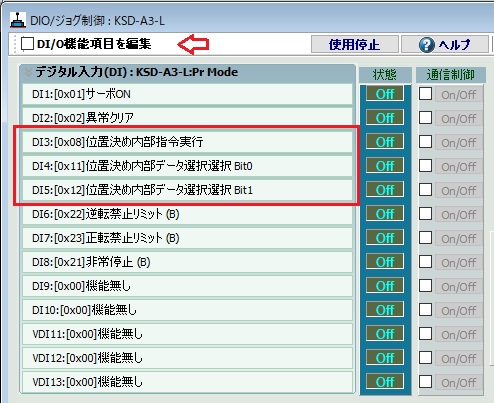
6.デジタル入力設定
「デジタル入出力/ジョグ制御」をクリックします。
外部 PLC からビット制御したいので、DI に「位置決め内部指令実行」と「位置決め内部データ選択Bit0,Bit1」を割り当てます。
※今回の事例では、プログラム 1 と 2 を指定できるようにしたいので、Bit0,1 を登録します。
プログラムのパターンが多い場合は、必要に応じて Bit2,3・・・と増やしてください。
4.運転
サーボOnします。
・DI4 を On/DI5 を Off にして、DI3 を On すると正転動作します。
(DI3は一度Offします)
・次に DI4 を Off/DI5 を On にして、DI3 を On すると逆転動作します。
5.高度な制御1
運転パターンによって、移動距離を変更したい場合は、RS-485(Modbus/RTU) 通信でパラメータを書き換えれば、運転パターンは正転/逆転の2通りでも、移動距離は都度変更出来ます。
正転(PR #1)の移動距離は P6.003、正転(PR #2)の移動距離はP6.005です。
6.高度な制御2
運転パターンを RS-485(Modbus/RTU) 通信で行うことも出来ます。
サーボ On の状態で、P5.007 に「1」を書き込むと正転動作します。
サーボドライブが位置決め開始すると、P5.007 は「+10000した値」になります。
サーボドライブが位置決め完了すると、P5.007 は「+20000した値」になります。
同様に P5.007 に「2」を書き込むと逆転動作します。
7.原点復帰
PR #0 を実行すると、原点復帰動作をします。
(DI4 を Off/ DI5 を Off にして、DI3 を On する)
原点復帰モードは PRモード設定画面の「原点復帰モード」で指定できます。
紹介動画