
Speed mode: 4th speed or more

Question
I would like to use a servo motor for speed control.
In speed control mode, the speed is selected using 2-bit signals (SPD0, SPD1).
At this time, you can either use external analog input or select one of the three internal speed commands.
What should I do if there are four or more speeds I want to specify?

Answer
If you use “speed command” in PR mode, you can command up to 99 different speeds.
As an example, we will explain using the following seven speeds.
Setting procedure
1. Mode Setting
Set the operation mode to “[0x01]: PR position control mode”.
2. Speed control
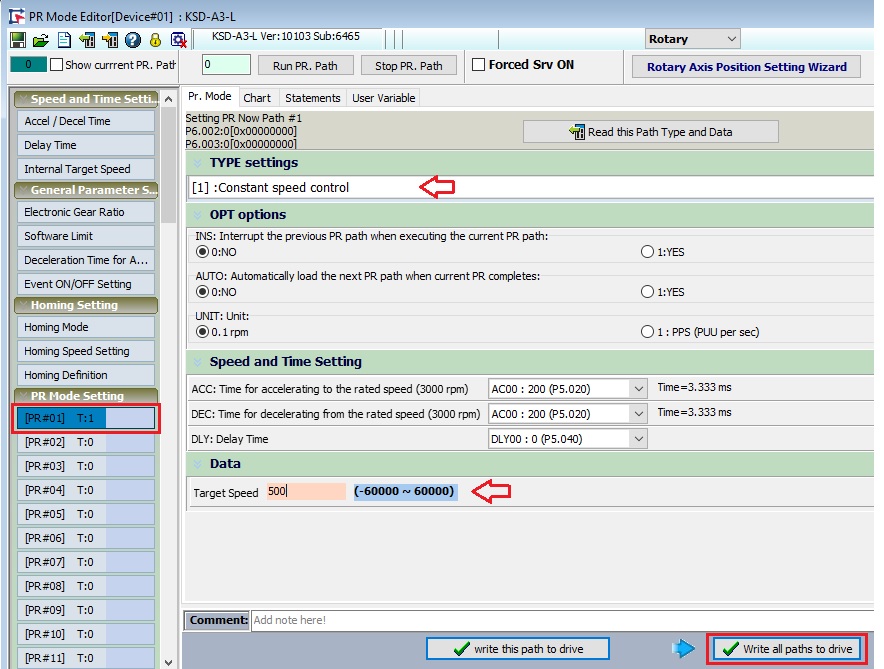
Click “PR Mode Setting” from KSD-Soft.
Next, click PR #1, set the TYPE path format to “Constant speed control”, and set the target speed of the data.
After setting the required items, click “Write all paths to drive”.
Do the same setting for PR #2 to #7.
3. Digital IO / JOG Control
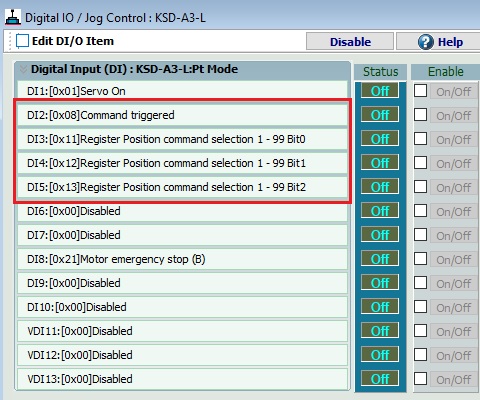
Click “Digital IO / JOG Control” from KSD-Soft.
Since we want to control the bits externally, set DI2 to DI5 as follows.
4. Driving
– Turn on the servo.
– When DI3 is turned on and DI2 is turned on, the motor will run at the speed specified by PR #1.
– Turn off DI2 once.
– If you turn on all DI3, DI4, and DI5 and then turn on DI2, the motor will run at the speed specified in PR #7.
5. Motor rotation direction
There are two ways to reverse the direction of motor rotation.
Case1. Set the target speed to a minus value.
Case2. Assign “[0x06] Reverse directtion of input command” signal to the digital input and turn it on.
Inquiry
Click here for inquiries by email