
Cylinder reciprocating

Question
I heard that the servo system manufactured by JTEKT Electronics can operate the motor without a PLC motion controller by using PR mode.
I would like to actually make the cylinder move back and forth.
What should I do?

Answer
Set the servo system to “PR mode” using the AC servo system setting software: KSD-Soft.
By registering the forward direction movement setting/reverse direction movement setting in a program and outputting DO from the PLC, forward/reverse movement can be performed.
Please refer to the following for the setting procedure.
Setting procedure
Connect the computer and AC servo system using the dedicated USB cable.
Start the configuration software: KSD-Soft and connect the AC servo driver via USB.
1. Reading parameters
Start the “Parameter Editor” and click “Read Parameters” from the icon to read the servo driver parameters.
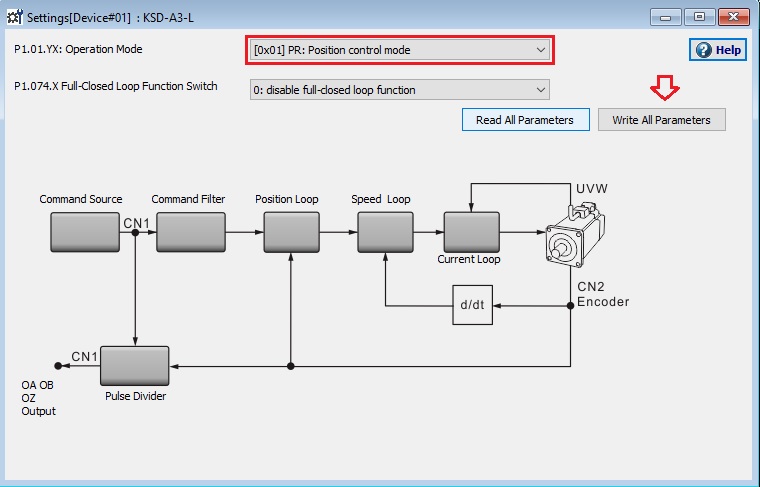
2. Mode Setting
Start the “Mode Setting” and set the operation mode to “[0x01]PR: Position control mode”.
To enable the settings, turn the servo system power off -> on.
* If you turn the servo system power off -> on, KSD-Soft will go offline, so please reconnect.
3. Register the operating program
99 different programs can be specified for the servo driver.
By turning on/off the “Register Position command selection bit x” assigned to DI, you can specify the program to be executed from the PLC.
In this example, we will register forward rotation operation in program #1 (PR #1) and reverse rotation operation in program #2 (PR #2).
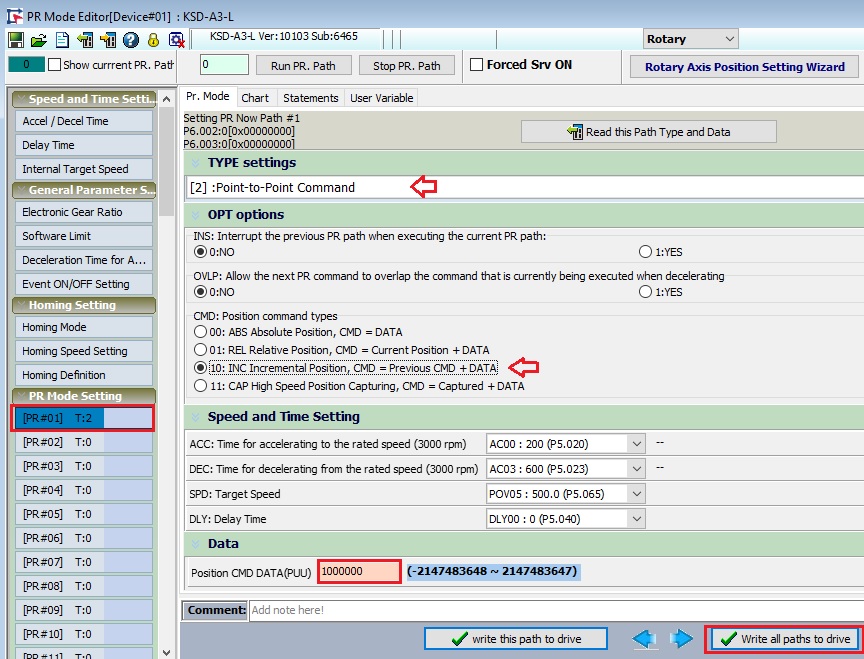
4. Forward rotation
Select PR #1 on the PR mode setting screen.
Set the target speed and position cmd data and write them to the servo driver.
* In this example, the target speed was 1,000 rpm and the position was 10 rotations.
(The denominator of the E-gear is 100,000, so if the position cmd data is 1,000,000 PUU, the motor will rotate 10 times.)
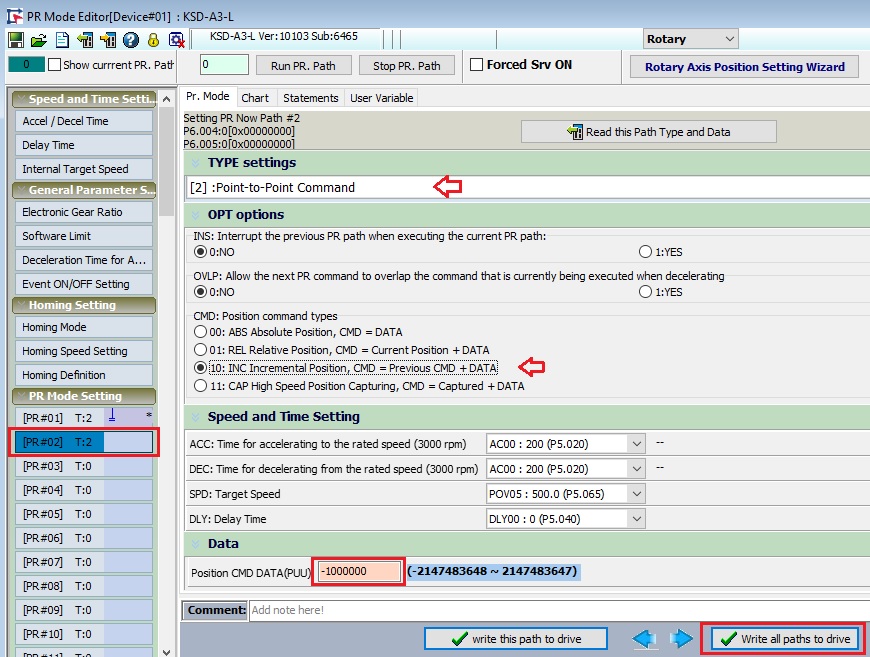
5. Reverse rotation
Select PR #2 on the PR mode setting screen.
Since we want to operate the same position in the opposite direction, the position cmd data is -1,000,000PUU.
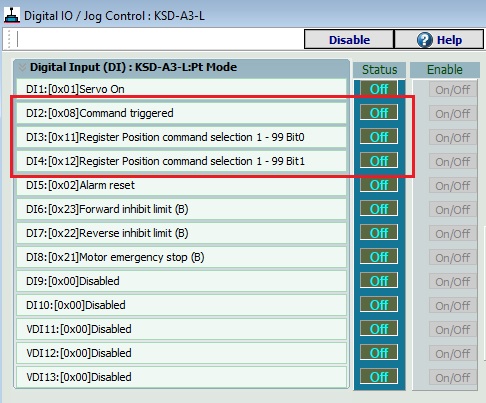
6. Digital IO Setting
Click “Digital DIO / JOG control” of KDS-SOFT.
Since we want to control bits from an external PLC, we assign “Command triggered” and “Register position command selection Bit0, Bit1” to DI.
* In this example, we want to be able to specify programs 1 and 2, so we will register Bits 0 and 1.
* If there are many program patterns, increase Bit2,3, etc. as necessary.
7. Operation
– Turn on the servo.
– If you turn DI4 on, DI5 off, and DI3 on, forward rotation will occur.
– DI3 will be turned off once
– Next, turn DI4 Off, DI5 On, and turn DI3 On to perform reverse operation.
8. Advanced control 1
If you want to change the position (PUU) on the driving pattern, by rewriting the parameters using RS-485 (Modbus/RTU) communication, you can change the position cmd data each time even if the driving pattern is forward/reverse.
The postition (PUU) for forward rotation (PR #1) is P6.003, and the position (PUU) for reverse rotation (PR #2) is P6.005.
9. Advanced control 2
Operation patterns can also be set via RS-485 (Modbus/RTU) communication.
When the servo is on, writing “1” to P5.007 will cause forward rotation.
When the servo drive starts positioning, P5.007 becomes “+10000 value”.
When the servo drive completes positioning, P5.007 becomes “+20000 value”.
Similarly, writing “2” to P5.007 will cause reverse operation.
10. homimg
Executing PR #0 performs a homing origin operation.
(Set DI4 Off, DI5 Off and DI3 On)
The homing origin mode can be specified in “Homing Mode” on the PR mode setting screen.
Inquiry
Click here for inquiries by email