
Position or Speed control mode: Torque limit

Question
I would like to use a servo motor in position control (PT/PR) or speed control mode.
At that time, I would like to limit the motor torque.
What should I do?

Answer
Enable the torque limit function and operate torque internal data selection bits 0 and 1 to limit the torque.
Please refer to the following for the setting procedure.
Setting procedure
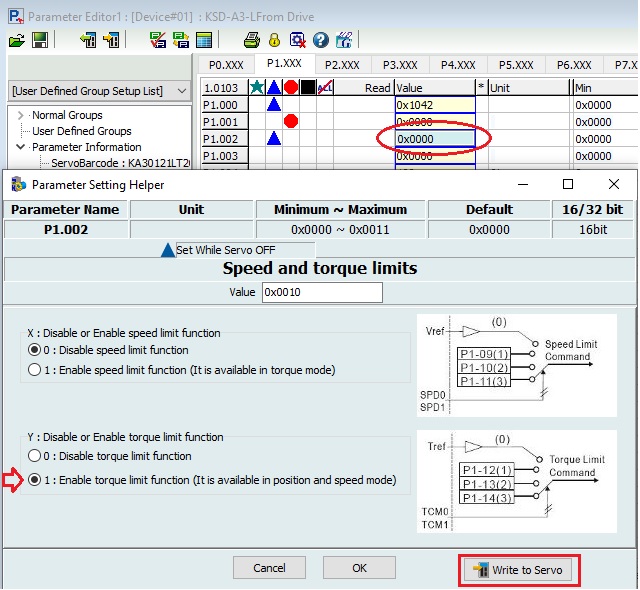
1. Enabling torque limit function
On the “Parameter Editor” screen, change the setting of P1.002 to enable torque limit.
Alternatively, on the “Digital IO / JOG Control” screen, assign the “0x09: Torque limit” signal to DI and turn it on.
2. Torque limit setting
Click “PR Mode Setting” from KSD-Soft.
Set the torque limit value to P1.012 to 014 in the parameter editor.
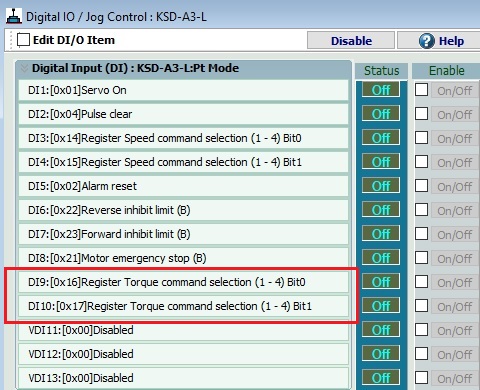
3. Digital input settings
Click “Digital IO / JOG Control” from KSD-Soft.
Since we want to control the bits externally, we assign “Register Torque command selection” to an empty DI.
* If you always limit the speed using analog command input, there is no need to assign “Register Speed command selection” to DI.
4. Driving
– When DI9 is set to Off and DI10 is set to Off, the torque limit proportional to the torque analog command input becomes effective.
* (Minus voltages are treated as absolute values and have the same limit value as plus voltages.)
– When DI9 is set to On and DI10 is set to Off, the torque limit set in P1.012 becomes effective.
– When DI9 is set to Off and DI10 is set to On, the torque limit set in P1.013 becomes effective.
– When DI9 is set to On and DI10 is set to On, the torque limit set in P1.014 becomes effective.
Inquiry
Click here for inquiries by email