
Position control using external pulses

Question
I would like to move a servo system using a pulse train from a PLC motion controller, etc.
What should I do?

Answer
Set the servo system to “PT mode” using the AC servo system setting software: KSD-Soft.
Position control can be performed by connecting the pulse train signal from the controller to the pulse input terminal of the servo driver.
Please refer to the following for the setting procedure.
Setup Steps
Connect the computer and AC servo system using the dedicated USB cable.
Start the configuration software: KSD-Soft and connect the AC servo driver via USB.
1. Reading parameters
Start the “Parameter Editor” and click “Read Parameter” from the icon to read the servo driver parameters.
2. Set the operation mode to “PT mode”
Start the “Mode Setting” and set the operation mode to “[0x00]PT: Position control mode”.
(The initial value is PT: position control mode.)
To enable the settings, turn the servo system power off -> on.
* If you turn the servo system power off -> on, KSD-Soft will go offline, so please reconnect.
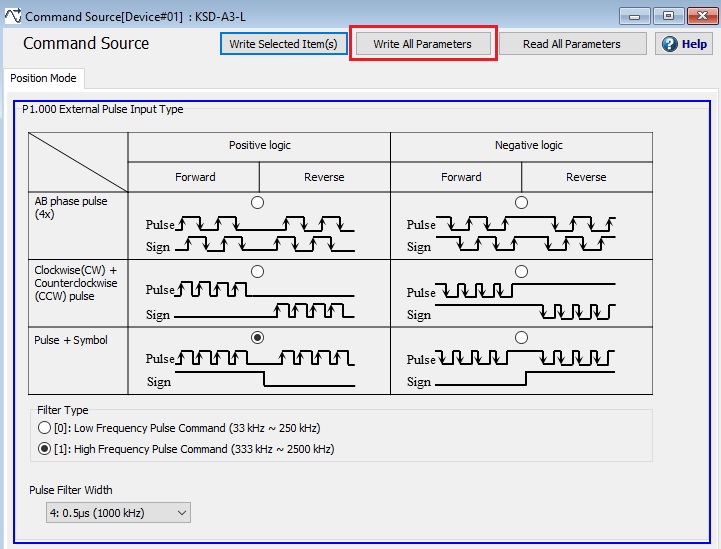
3. Register external pulse input format
Activate the “Command Source” from the KSD-Soft and select the type of the pulse train output by the controller.
The filter width should be less than 1/4 of the pulse width.
4. E-gear settings
Activate and set the “E-gear Ratio” from KSD-Soft.
For more information on the concept of E-gears, please click here.
5. Wiring
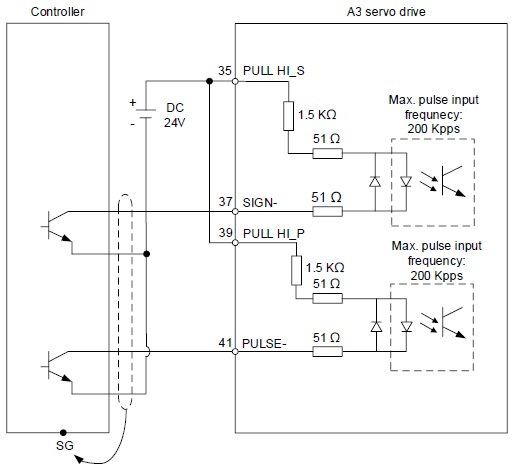
If the controller has NPN open collector output, wire as shown below.
(Please prepare the external power supply by yourself)
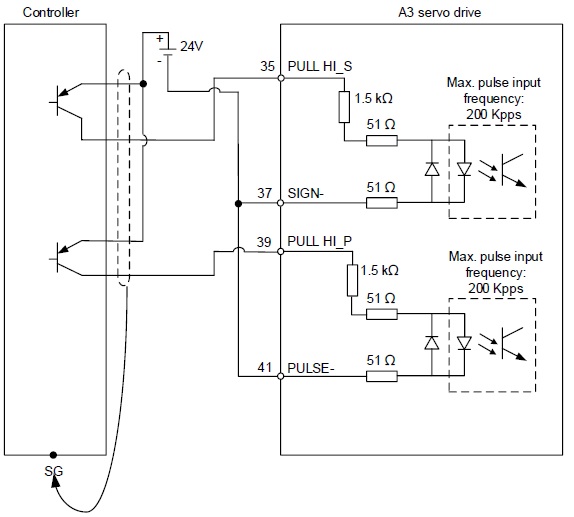
If the controller has PNP open collector output, wire as shown below.
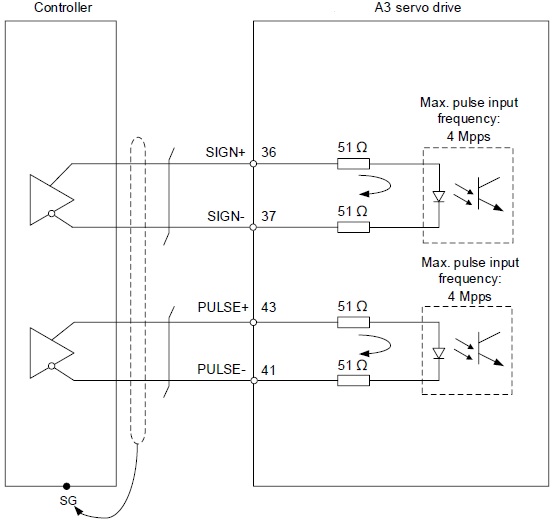
If the controller has differential output, wire as shown below.
6. Driving
TWhen the servo is turned on and pulses are output from the controller, the motor will rotate.
If it is AL013/014/015, please see here.
Inquiry
Click here for inquiries by email